
Welcome to the home page of the RTSIM
project. RTSIM stands for (Real-Time system SIMulator). It is
a collection of programming libraries written in C++ for
simulating real-time control systems.
RTSim has been developed at Retis Lab of the Scuola Superiore Sant'Anna as
an internal project. It has been used primarily for
experimenting with new scheduling algorithms and
solutions. For this reasons, it contains, already implemented,
most of the scheduling algorithms developed at Retis Lab.
We now decided to release this software as open source, to let
other researcher in the world to play with the simulator. The
dream is to have a common simulation platform for comparing
the performance of new scheduling algorithms.
RTSim is currently compatible with many systems, including
several distros of Linux, recent FreeBSD, Mac OS X and
Cygwin. In addition, the software has been tested with all
major releases of GCC, from 2.96 to 4.0.1. Under Windows, the
software can also be built using MinGW32.
Current version is 0.5, you can dowload from SourceForge at the
link below:
Get RTSim
Instructions for compiling and installing the software are in
the README file included in the distribution.
If you want to use the ctrlib features, you must also download
and install octave. We tried out this version of octave:
octave-2.0.16
However, many recent versions of octave have been successfully
tested with RTSim. Please read the README file for specific
per-version instructions, and possibly to set up for octave
usage (you may need to correct some errors in the octave headers
depending on which version of octave and GCC you have).
New in 0.5:
- GCC 4 support
- Dynamic libraries
- XML support using Xerces-C++
- C++ GUI based on Qt (versions 3 and 4)
- DLL support in Windows
New in 0.4:
- Full Autotools support (no more custom Makefiles)
- Compatibility with GCC 3.4
- Fully functional ctrlib
- No more "deprecated" warnings
- New ChangeLog and README
- Many changes under the hood
New in 0.3:
- changed Tick into a class
- rewritten the DAG algorithms
- rewritten the DRA algorithm
- moved JTracer to JDK 1.5 (no templates used though)
- renamed rtlib.h to rtlib.hpp
RTSIM consists of 4 components:
- metasim: it is a it is a generic library for simulation of
discrete event systems. This library is also released
separately, see the metasim
home page.
- rtlib: based on metasim, it is library for simulating
scheduling algorithms and real-time tasks.
- ctrlib (optional): it is a library for simulating
real-time control systems. It requires the octave
library.
- jtracer (optional): it is a java based tool for
visualisation of schedule traces produced by a rtlib
program.
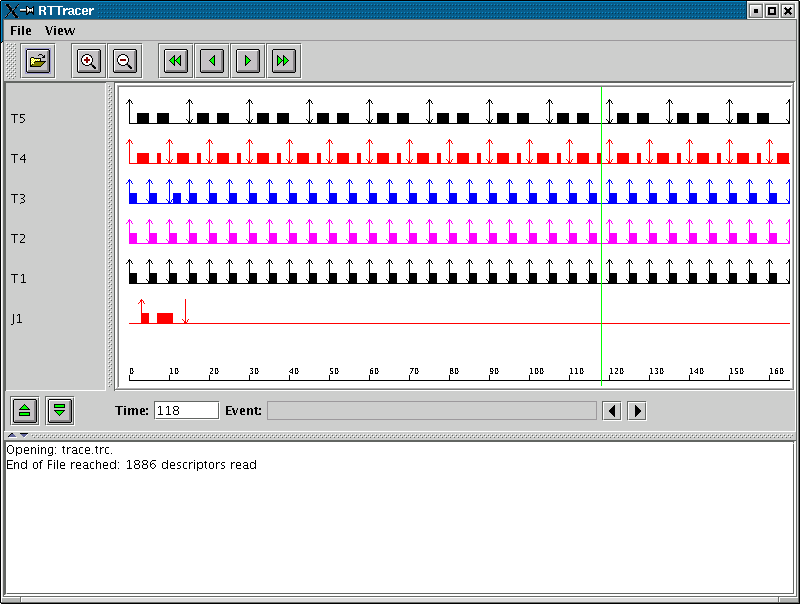
Screenshots
In the first screenshot you can see a jtracer window showing a
schedule of 5 periodic tasks (T1, ..., T5) plus one aperiodic
job (J1) on 3 processors, scheduled by EDF. This example is part
of the RTSIM distribution: you can find the source code in
rtsim/rtlib/examples/medf. On each line you can see the time
diagram of each task, and each task is shown in a different
color.
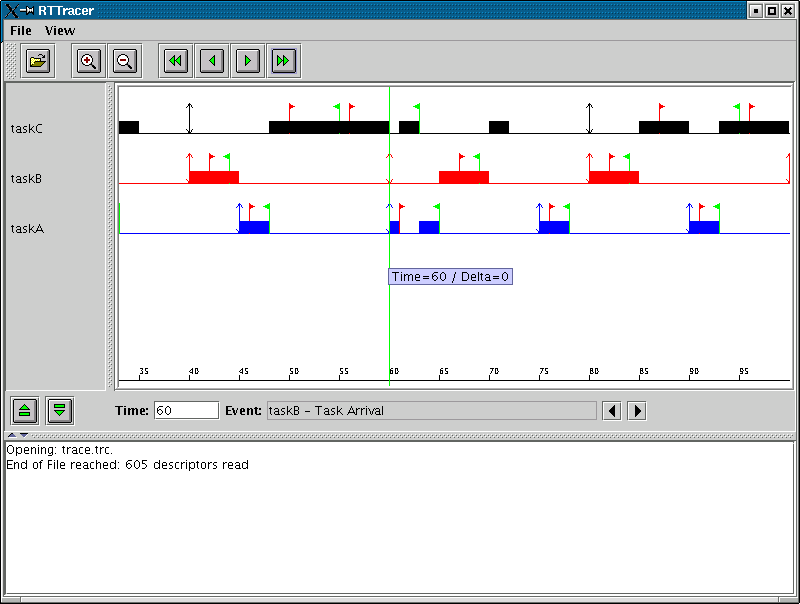
In this second screenshot, you can see three tasks scheduled on
one processor with fixed priority plus the priority inheritance
protocol. Each red flag represents a wait operation on a
semaphore, and each green flag represents a signal operation. In
the figure, task A is the highest priority task, task B is the
medium priority, and task C has the lowest priority.
Notice what happens at time 60: task A, which is the highest
priority task, tries to lock the resource, but it is blocked by
task C. Thanks to the priority inheritance mechanism, task C can
now execute with the priority of task A, thus executing before
tasks B.
As you can see, the priority inversion problem is avoided. This
example is part of the RTSIM distribution: you can find the
source code in rtsim/rtlib/examples/piresman.
If you want to ask any kind of question, report bugs or just
being informed of new releases, please use the SourceForge
website:
Bug report
Request for enhancements
Support forum
If you want to join the development of RTSIM, please contact the
project administrator at
this address.
Note that you will need a SourceForge account.
Cesare Bartolini
Giuseppe Lipari
